Stell dir vor, du hast gerade sechzig Euro für Hardware ausgegeben, stundenlang Code geschrieben und endlich alles in ein wasserdichtes Gehäuse für deine Naturbeobachtung im Garten geschraubt. Es ist Mitternacht, der erste Testlauf startet, und das Bild bleibt schwarz oder zeigt nur grauen Pixelmatsch. Du prüfst die Kabel, startest den Dienst neu, tauschst das Netzteil – nichts. Am nächsten Morgen stellst du fest, dass der Autofokus-Motor durchgebrannt ist, weil dein Skript in einer Endlosschleife versucht hat, auf ein Objekt in zwei Zentimetern Entfernung scharfzustellen, das dort gar nicht existiert. Ich habe diesen Moment bei Dutzenden von Entwicklern miterlebt, die dachten, das Raspberry Pi Camera Module 3 sei einfach nur ein Upgrade zum Einstecken und Loslegen. In der Realität ist diese Hardware eine Mimose, die dir jede Unachtsamkeit bei der Stromplanung oder der Software-Ansteuerung sofort mit Hardware-Defekten oder unbrauchbarem Bildmaterial quittiert. Wer hier wie bei den alten Versionen 1 oder 2 vorgeht, wirft schlichtweg Geld aus dem Fenster.
Das Märchen von der Kompatibilität mit alten Gehäusen
Einer der teuersten Fehler passiert schon vor dem ersten Einschalten. Viele Nutzer denken, da die Platine fast identisch aussieht wie bei der Version 2.1, passt sie auch in die alten Gehäuse. Das ist falsch. Das Raspberry Pi Camera Module 3 besitzt einen deutlich größeren Kamera-Buckel aufgrund des Autofokus-Mechanismus. Wenn du versuchst, die Platine in ein enges Standard-Gehäuse zu pressen, drückst du direkt auf die bewegliche Linse.
Ich habe Projekte gesehen, bei denen ganze Chargen von Überwachungskameras zerstört wurden, weil die Gehäusedeckel auf das Objektiv drückten. Der Motor will die Linse bewegen, stößt gegen das Plastik und brennt innerhalb weniger Minuten durch. Die mechanische Belastung sorgt zudem für eine Dezentrierung der Optik. Selbst wenn sie danach noch fokussiert, ist eine Ecke des Bildes immer unscharf. Du brauchst zwingend Gehäuse, die spezifisch für diese Bauform entworfen wurden oder eine Aussparung von mindestens 12 mal 12 Millimetern für den Optikblock lassen. Wer hier spart oder bastelt, zerstört das teuerste Bauteil des Moduls.
Strommangel ist der Feind des scharfen Bildes
Ein Raspberry Pi 4 oder 5 verzeiht viel, aber die neue Kamera-Generation nicht. Während die alten Sensoren fast vernachlässigbaren Strombedarf hatten, zieht der PDAF-Sensor (Phase Detection Autofocus) zusammen mit dem VCM-Aktuator (Voice Coil Motor) für den Fokus beachtliche Spitzenströme. Wenn dein Netzteil gerade so die 3 Ampere für den Pi liefert und dann die Kamera den Fokusmotor anwirft, bricht die Spannung für Millisekunden ein.
Das Ergebnis ist kein Totalausfall, sondern ein viel subtileres Problem: I2C-Bus-Fehler. Die Kamera verliert die Verbindung zum System, der Treiber stürzt ab und hinterlässt eine "Camera not found" Meldung im Log. Viele suchen dann den Fehler im Flachbandkabel. Ich sage dir: In neun von zehn Fällen ist es das Netzteil oder ein zu langes, minderwertiges USB-C-Kabel zum Pi. Nutze das offizielle Netzteil. Wenn du die Kamera über ein langes Kabel (über 200 mm) anbindest, steigt der Widerstand so weit an, dass der Autofokus instabil wird. Ein stabiler Betrieb mit billigen Handy-Ladegeräten ist bei dieser Hardware ausgeschlossen.
Die bittere Wahrheit über den Autofokus des Raspberry Pi Camera Module 3
Der Autofokus wird oft als das Killer-Feature beworben. In der Praxis ist er die größte Fehlerquelle. Wer einfach nur libcamera-hello startet, freut sich über ein scharfes Bild. Wer aber eine Zeitraffer-Aufnahme über 24 Stunden macht, erlebt oft eine Überraschung: Jedes zehnte Bild ist komplett unscharf. Warum? Weil der Standard-Algorithmus bei schwierigen Lichtverhältnissen "pumpt". Er findet keinen Kontrastpunkt und bleibt irgendwo am Anschlag stehen.
Den Fokus festnageln statt suchen lassen
In einem industriellen Umfeld oder bei fest installierten Kameras ist ein aktiver Autofokus oft kontraproduktiv. Ich habe erlebt, wie Leute versuchten, eine Fließbandkontrolle aufzubauen, und die Kamera bei jedem vorbeifahrenden Teil neu fokussierte. Das dauert etwa 200 bis 500 Millisekunden – viel zu langsam für schnelle Prozesse. Die Lösung ist, den Fokus einmalig beim Systemstart auf einen festen Wert zu setzen und den Motor dann schlafen zu legen. Das spart Strom, verhindert Hitzeentwicklung im Kamerakopf und sorgt für konsistente Ergebnisse. Der Befehl --lens-position in den Libcamera-Apps ist dein bester Freund. Experimentiere mit Werten zwischen 0.0 (unendlich) und höheren Werten für den Nahbereich, bis es passt. Verlass dich niemals blind auf die Automatik, wenn du reproduzierbare Daten brauchst.
Hitzeentwicklung und Bildrauschen
Der Sensor des Moduls wird im Betrieb warm, besonders wenn HDR (High Dynamic Range) aktiviert ist. Bei langen Belichtungszeiten in der Nacht führt diese Eigenwärme zu thermischem Rauschen. Ich sehe oft, dass Leute die Kamera in kleine, luftdichte Plastikboxen packen. Nach zwei Stunden Betrieb steigt das Rauschen so stark an, dass die Objekterkennung deines Python-Skripts versagt. Wenn du ernsthafte Bildverarbeitung betreibst, muss die Rückseite der Kameraplatine atmen können. Ein kleiner Kühlkörper auf dem rückseitigen Chip der Kamera-Platine wirkt Wunder, wird aber fast nie verbaut, weil es "nur ein Raspberry Pi" ist. Das ist Bastler-Mentalität, die Profi-Ergebnisse verhindert.
Legacy-Software ist eine Sackgasse
Hier machen die meisten den folgenschwersten Fehler bei der Planung ihrer Software-Architektur. Sie versuchen, alte Tutorials für raspistill oder raspivid zu nutzen. Das wird mit dieser Hardware niemals funktionieren. Die alten Treiber unterstützen den IMX708-Sensor nicht. Du musst zwingend auf den neuen Libcamera-Stack setzen.
Das Problem dabei: Viele Python-Bibliotheken, die seit Jahren nicht aktualisiert wurden, basieren auf dem alten MMAL- oder V4L2-Interface, das mit der neuen Hardware nicht mehr so kommuniziert, wie du es erwartest. Wenn du jetzt ein Projekt startest, musst du Picamera2 (die neue Python-Bibliothek) verwenden. Wer versucht, alten Code mit "Legacy-Support" in der raspi-config zum Laufen zu bringen, kastriert die Kamera. Du verlierst den Autofokus, die HDR-Funktion und einen Großteil der Auflösung. Wer heute noch Zeit in die Portierung von altem Code auf das neue Modul steckt, ohne die Bibliothek zu wechseln, verbrennt schlichtweg Arbeitszeit.
Ein Vorher-Nachher-Vergleich aus der Praxis
Schauen wir uns ein typisches Szenario an: Eine Wildtierkamera im Wald, betrieben mit einem Akku-Pack.
Der falsche Ansatz (Vorher):
Der Anwender nutzt ein Standard-Gehäuse der Version 2, schneidet ein Loch für die Linse hinein und klebt die Kamera mit Heißkleber fest. Als Software dient ein altes Skript, das alle 10 Sekunden ein Bild via os.system("raspistill ...") macht. Der Akku hält 6 Stunden, weil der Pi ständig unter Last ist, um den Legacy-Treiber zu emulieren. Die Bilder sind bei Sonnenaufgang überbelichtet und bei Nacht unscharf, weil der Autofokus der alten Software den Motor gar nicht ansteuern kann. Nach drei Tagen dringt Feuchtigkeit ein, weil der Heißkleber am heißen Kameramodul weich wurde und sich gelöst hat.
Der richtige Ansatz (Nachher):
Ich habe das System mit einem dedizierten Gehäuse für das neue Modul aufgebaut. Die Kamera wird mechanisch verschraubt, nicht geklebt. Das Skript nutzt Picamera2 und setzt beim Start einmalig den Fokus auf die Entfernung zum Köderplatz. HDR ist nur tagsüber aktiviert, um die harten Schatten im Wald auszugleichen. Durch die native Einbindung des Libcamera-Stacks wird die GPU des Pi effizient genutzt, was die CPU-Last und damit den Stromverbrauch senkt. Der Akku hält nun 14 Stunden, und jedes Bild ist vom ersten Pixel an scharf, weil keine mechanische Blockade der Linse vorliegt. Die Kosten für die Hardware waren identisch, aber die investierte Zeit in das Verständnis der neuen Architektur verhinderte den Totalausfall.
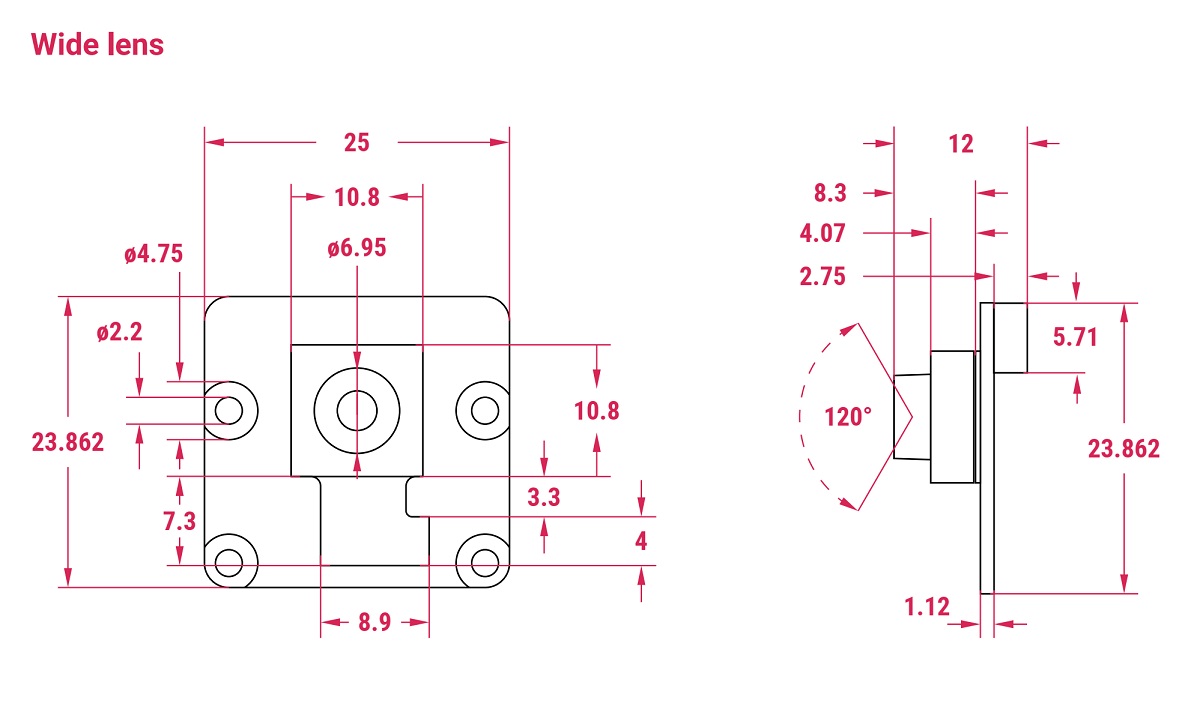
Optische Grenzen und das Weitwinkel-Dilemma
Es gibt das Modul in einer Standard- und einer Wide-Variante. Ein häufiger Fehler ist der Griff zur Wide-Version, "um mehr zu sehen". In der Theorie klingt das gut: 120 Grad Sichtfeld statt 75 Grad. In der Praxis erkaufst du dir das mit massiven Verzerrungen an den Rändern und einer deutlich geringeren Pixeldichte auf das einzelne Objekt gerechnet.
Wenn du Nummernschilder erkennen oder Gesichter identifizieren willst, ist die Wide-Version dein Untergang. Die Auflösung von 12 Megapixeln verteilt sich auf eine viel größere Fläche. In der Mitte des Bildes ist alles fein, aber zu den Rändern hin verlierst du massiv an Details. Ich habe erlebt, wie Projekte zur Parkplatzüberwachung gescheitert sind, weil man die Wide-Variante kaufte und am Ende die Kennzeichen der Autos am Rand nicht mehr lesen konnte. Überlege dir genau, ob du die Breite wirklich brauchst. Für die meisten Überwachungs- oder Analyseaufgaben ist die Standard-Variante mit der längeren Brennweite die technisch überlegene Wahl, weil sie das Licht besser auf den Sensor konzentriert.
Realitätscheck
Erfolgreich mit dem Raspberry Pi Camera Module 3 zu arbeiten bedeutet, zu akzeptieren, dass die Zeiten des einfachen "Plug and Play" vorbei sind. Diese Kamera ist ein hochkomplexes Stück Optoelektronik, das mehr Ähnlichkeit mit einem modernen Smartphone-Kamerasystem hat als mit einer einfachen Webcam. Du wirst scheitern, wenn du:
- Die Stromversorgung nicht ernst nimmst und denkst, ein billiges USB-Kabel reicht.
- Den neuen Software-Stack (Libcamera) ignorierst und versuchst, alte Tutorials nachzubauen.
- Die Mechanik des Autofokus unterschätzt und sie in unpassende Gehäuse zwängst.
Es gibt keine Abkürzung. Du musst dich mit der Picamera2 Dokumentation beschäftigen und verstehen, wie man den Fokus-Motor per Software bändigt. Wenn du bereit bist, diese Lernkurve zu akzeptieren und die Hardware wie ein Präzisionsinstrument zu behandeln, bekommst du Bildergebnisse, die vor zwei Jahren auf einem Einplatinencomputer noch undenkbar waren. Wenn nicht, hast du am Ende nur einen weiteren teuren Briefbeschwerer mit einer zerquetschten Linse in der Schublade liegen. Es liegt an deiner Sorgfalt bei der ersten Inbetriebnahme, ob das Projekt fliegt oder abstürzt. Klappt es nicht, liegt es fast nie an der Hardware selbst, sondern an der Ignoranz gegenüber ihren spezifischen Anforderungen.



